����ȡ���־��̽�������Ʒ������ϵͳ |
| 2013-08-13 10:31 ���ߣ�Է�� ���� ��Դ�������-����ȡ���־ HV�� �༭�� ������������
|
|
��������һ�ַ������ϵͳ����ƣ��ñ�ϵͳ��AT89S52��Ƭ��оƬΪ���ģ����Ա�Ҫ����Χ��·������A/Dת����������ʾ�����̿��ƺ͵�������ȣ���ʵ�ֶԷ���ϵͳ�ĽǶȿ���Ҫ��ϵͳ��Ҫ����С��Ƭ��ϵͳ��LMD18200�������ģ�顢���塢A/D�Լ�LED��ɡ������ԣ�ϵͳʵ�ֶԷ���ǶȵIJ���������ʾ������ǶȵĿ��Ƶ����ȹ��ܡ�
����
����0����
�����Ƕ��Զ���������ϵͳ�ں��պ��졢������������ʻ����ʵ���������ж�����ҪӦ�ã�������ŷdz���Ҫ���о���ֵ�㷺��Ӧ�ü�ֵ���ѵ�Ƭ����Ƕȴ�������Ч����������Ϳ�ʵ��һ������ĽǶ��Զ��������ơ�������ϸ�����˻��ڵ�Ƭ�����ƵĽǶ��Զ�����ϵͳ��Ʒ�������ϵͳ��Է���ǶȽ��п��ƣ��ɸ�����Ҫ�Զ���������ƫת�Ƕȴ�С��
����1ϵͳ����ԭ��
�����������ϵͳϵͳ�ɵ�Ƭ������ʾ��������AD��������������ɣ�ͨ��AD�ɼ����ź�ʵʱ��ʾ����ת�ǣ�ͨ�����ȷ��ٵĴ�С����ת�ǵĴ�С��
����
����
����
����
����
����
����ͼ1ϵͳ�ṹͼ
������ģ��ϵͳ��·�ķ���ѡ��
����1.1���ȿ��Ƶ�·
��������ѡ��̨ʽ�����ɢ�ȷ��ȣ���ѡ�ò����������оƬLMD18200���Ʒ��ȵ�ת����ʵ�ֶԷ���ǶȵĿ��������������Ҫ�����������ʱ��ֻ��ͨ�����̿��Ʒ��ȵ�ת����ߣ�������������Ӷ��ı䷫�����б�Ƕȣ���֮ͬ����
����1.2�ǶȲ�����·
�����������Ե�λ��������ĽǶȱ仯ת��Ϊ��ѹ�ı仯���Ӷ���Ӳ����������ǽǶȡ�����ת��������һ5K�ĵ�λ��������ת��ʱ���Ƕȵı仯ת��Ϊ��ѹ�仯��ͨ����Ƭ������AD������вɼ����Ӷ���ɲ�����
����1.3��ʾ��·
����������ܽ�����ʾ�������������ʾ�ٶȿ죬ʹ�ü����ǵ���ϵͳ��ʾ��Ϣ��������ʾ������Ϣ���ӳɱ��Ƕȿ��ǣ�����ѡ��3λLED��ʾ��
����1.4����ϵͳ��·
�����õ�Ƭ����Ϊ�����������оƬLMD18200�Ŀ��Ƶ�Ԫ����Ƭ����ɿ����㷨���ٽ�������ת��ΪPWM�ź������LMD18200��ʵ�ֶԷ��ȵĿ��ơ����ڵ�Ƭ��ϵͳ��һ������ϵͳ��������źŵı任��ȫ����Ӳ�������������������Ž�С������ϵͳ�����ɿ���
�����Ӷ��������ϵͳ���巽��ȷ�����£��ɵ�Ƭ��AT89S52�������������оƬLMD18200��LED��ʾ�������̡����Ե�λ����̨ʽ�����ɢ�ȷ��ȡ�ֱ����Դ��ģ����ɡ����õ�Ƭ������PWM�źŵ��������������оƬLMD18200�������ȣ����ȴ�����������ڽǣ�����ת��������5k��λ��������ת��ʱ��λ���Ὣ�ڶ��Ƕȵı仯ת��Ϊ��ѹ�仯����ѹ�ı仯�����������ư��AD����оƬADC0809������AD�����ݣ�ת��Ϊ�Ƕ���Ϣͬʱ���������ʾ��ͬʱAD�IJ���������Ϊ�ο���������PWM����Ŀ��ȴӶ���������ڽǴ�С��
����2���۷��������
����2.1���ȿ��Ƶ�·
����������ϵͳ���ƹ����У���ƿ��Ʒ�ΧΪ0~60°��������2°Ϊ���䷶Χ����������������ƹ�������Ҫ30�����Ƶ㡣���õ�Ƭ����Ӧ30�����Ƶ������ͬ��PWM�źŵ��������������оƬLMD18200�������ȣ�����ת��������ǿ���ɲ���0~60°��ת�DZ仯��
����2.2�ǶȲ���ԭ��
��������ת��������һ5K�ĵ�λ��������ת��ʱ���Ƕȵı仯ת��Ϊ��ѹ�仯�����ڲ���5k��λ���ϵĵ�ѹ�ź���Ϊ�����źţ���λ�����5V��ѹ����ADC0809Ϊ8λת��������λ��ѹ�źű仯��Ϊ�SV=5V/256��ϵͳҪ��Ƕȷ�Χ��0~60°���ʶ�����ʾ��Χ��0~64°��ȡÿ4����λ��ѹ�źŵı仯���ȼ���1°�ĽǶȱ仯��
����2.3�����㷨
������Ƭ���ڲ���ʱ������1ms��ʱ����ΪPWM�źŵ�λ����ʱ�䡣ͨ����ADC0809ת���õ���256��������������ÿ4λ������Ϊһ�����Ƶ�λ��������256/4=64������������ΪPWM�źŵ��������������������������оƬLMD18200�������ȣ�������ͬ�ķ��ٱ仯��
����3��·��������
����3.1���ȿ��Ƶ�·
������ͼ2��ʾΪ���ȿ��Ƶ�·��LMD18200������Ʒ���ת�ٿ�����
����
����ͼ2���ȿ��Ƶ�·
����3.2�����㷨�����ʵ��
����ϵͳ�ӵ���Զ���ʼ�Ƕȼ�Ⲣ��ʾ��������Ƕȷ����ı�ʱ����ʵʱ��ʾ��ǰ�Ƕ���ֵ�����¶�Ӧ������ɿ��Ʒ���ת�٣��Դﵽ���Ʒ���ǶȵĹ��ܡ�Ϊ�����ij����Բ������������C���Ա�д�����Ʒ���PWM�ź����������жϿ��ƣ������������źŶ�����ݿ���Ҫ���趨������ֵ�����������������оƬLMD18200�������źţ��Դ������Ʒ���ת�١�ͼ3Ϊ����������ͼ��
����
����
����
����ͼ3����������ͼ
����3.3�����·ͼ
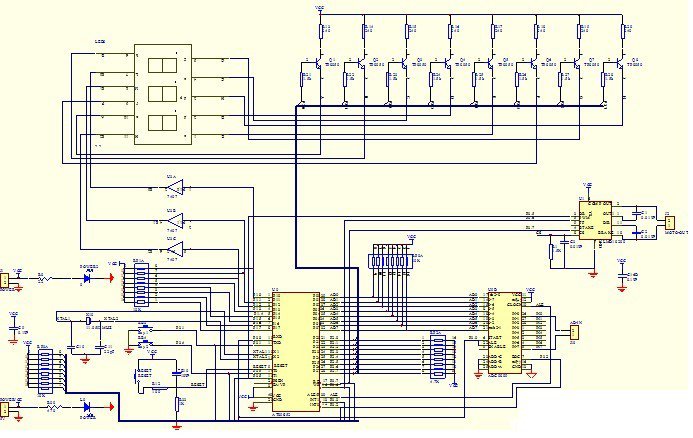
���������·ͼ�ɵ�Ƭ��AT89S52�������������оƬLMD18200��LED��ʾ�������̡����Ե�λ����̨ʽ�����ɢ�ȷ��ȡ�ֱ����Դ��ģ����ɡ����õ�Ƭ������PWM�źŵ��������������оƬLMD18200�������ȣ����ȴ�����������ڽǣ�����ת��������5k��λ��������ת��ʱ��λ���Ὣ�ڶ��Ƕȵı仯ת��Ϊ��ѹ�仯����ѹ�ı仯�����������ư��AD����оƬADC0809������AD�����ݣ�ת��Ϊ�Ƕ���Ϣͬʱ���������ʾ��ͬʱAD�IJ���������Ϊ�ο���ͨ�����̰���������PWM����Ŀ��ȴӶ���������ڽǴ�С�������·ͼ��ͼ4��ʾ��
����
����ͼ4�����·ͼ
����4������
������Ʋ��õ�Ƭ����СϵͳΪ���ƺ��ģ�ʵ����һ�����ķ������ϵͳ����ϵͳ��AT89S52��Ƭ��оƬΪ���ģ����Ա�Ҫ����Χ��·������A/Dת����������ʾ�����̿��ƺ͵�������ȣ���ʵ���˶Է���ϵͳ�ĽǶȿ���Ҫ����ƽ���Ƭ��������ǶȲ����������ϣ�������ʵʱ��ȷ�������ݵ�ͬʱ�������ֳ����ߣ������� |
|
|
|
���ԡ�����ȡ���־��̽�������Ʒ������ϵͳ���������ۡ� |
��Ȩ������������
�� ����վ����Ͷ����Դ�ڡ����ѡ����漰Ͷ�ʡ����ơ����ѵ����ݣ������Ƿ�������������š�����վ�������������ṩ���������ڡ���桿���ʣ������Ķ��������ɾ���ʵʩ���飬������Դ����ݴ˲����������Ե���
�� ������Դע�����������������س�ν�����֡�ͼƬ������Ƶ����Ȩ��������վ���У��κ�ý�塢��վ������辭����վ���ɷ��ɸ��ƻ�ת�أ�����ʹ��ʱ����ע����Դ������������Ӧ��Դ��Υ�߱���վ�����������Ρ�
�� ע����ԴΪ����ֽ����־����վ������ý������£�����ԭ������������Ȩ������վת������ý������Ϊ�����������Ϣ������������ͬ��۵�Ͷ�����ʵ�Ը��𣬱���վ���е���������Ȩ��Ϊ���������Ρ�
�� ����վ���Է������������ݵ���ʵ�ԡ��Ϸ��ԡ�ȷ�������������������Ϊ������ת�����ݣ��漰����Ȩ��Υ�������⣬���йص�λ��������뱾��վȡ����ϵ����ϵ�绰��01057255600�������ǽ���һʱ���ʵ������
|
|